- Рейтинг
- 2
У меня проблема с ригом робота паука.
Вот так он выглядит.
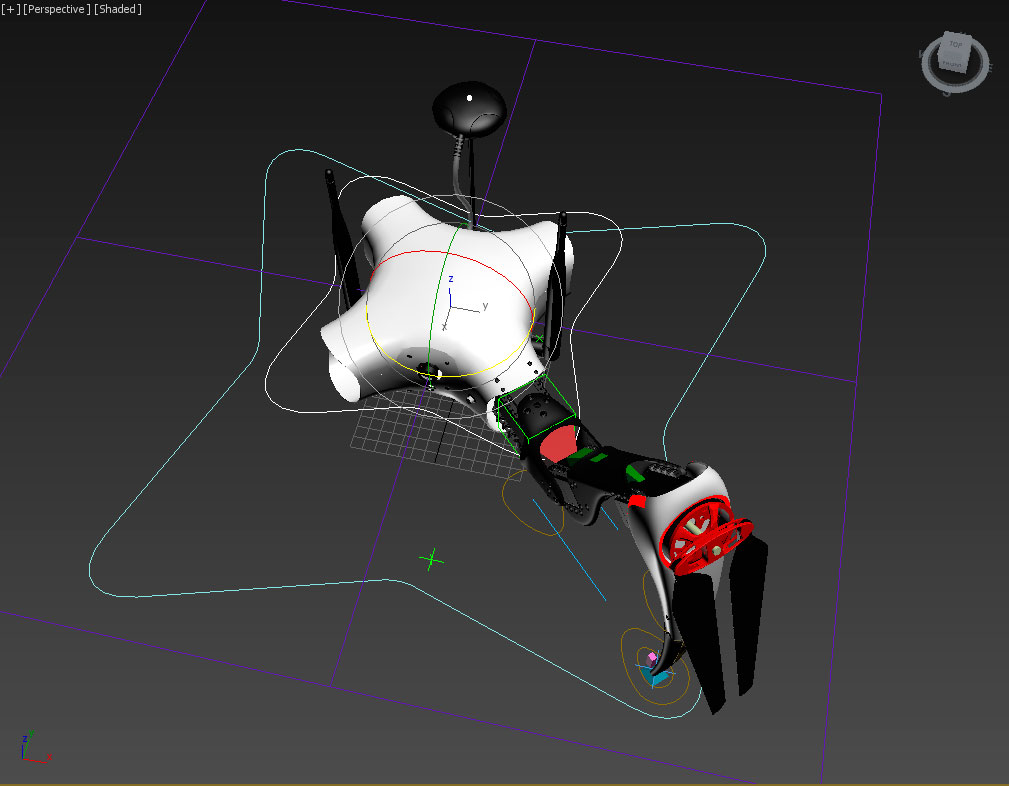
По задумке он должен двигать/поворачивать тело не сдвигая точку опоры ноги. Примерно вот так.
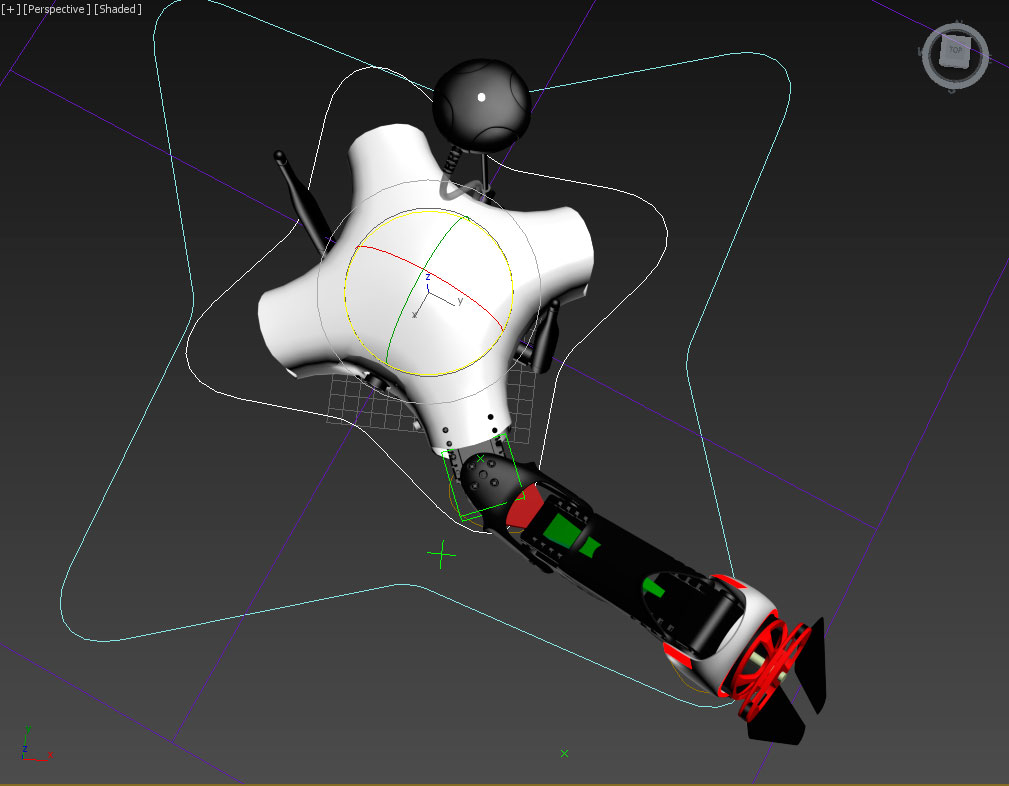
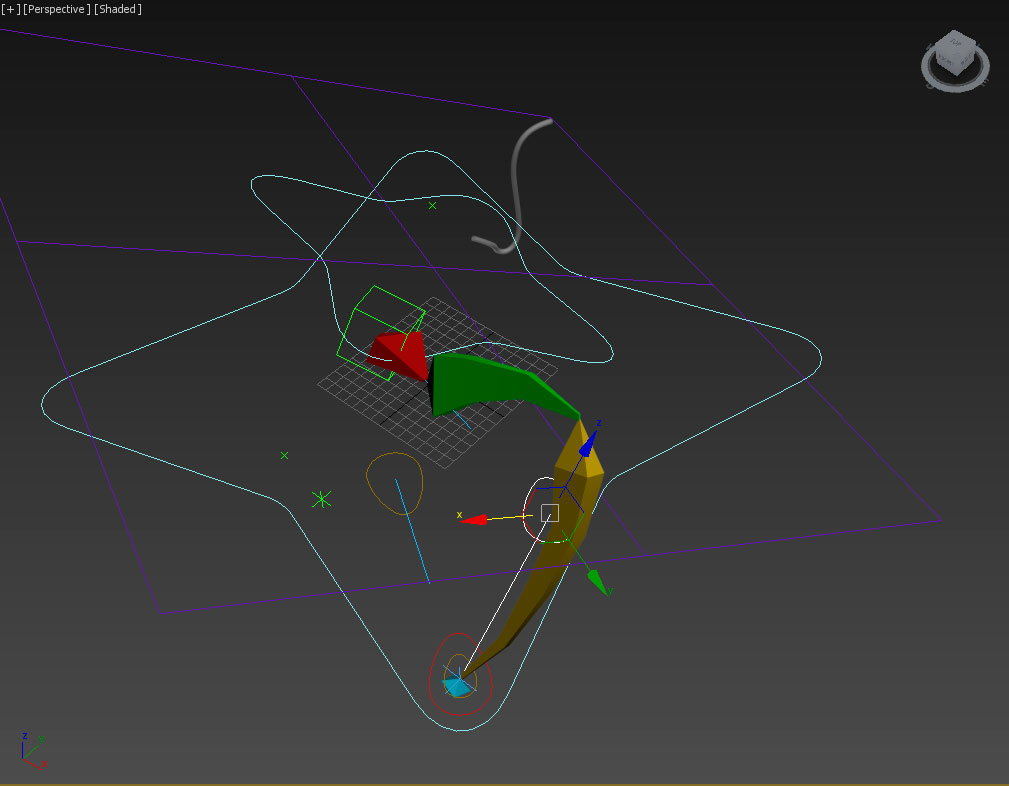
Вращается по оси Z нормально. Кость в начале ноги (может вращаться только в локальной Z) лукатом смотрит на точку опоры ноги сдвинутую на свою высоту. Остальные 2 кости висят на ик. Все три кости в одной плоскости.
Если добавить вращение по Y (чтобы робот поднимал вверх камеру) сустав выворачивается.
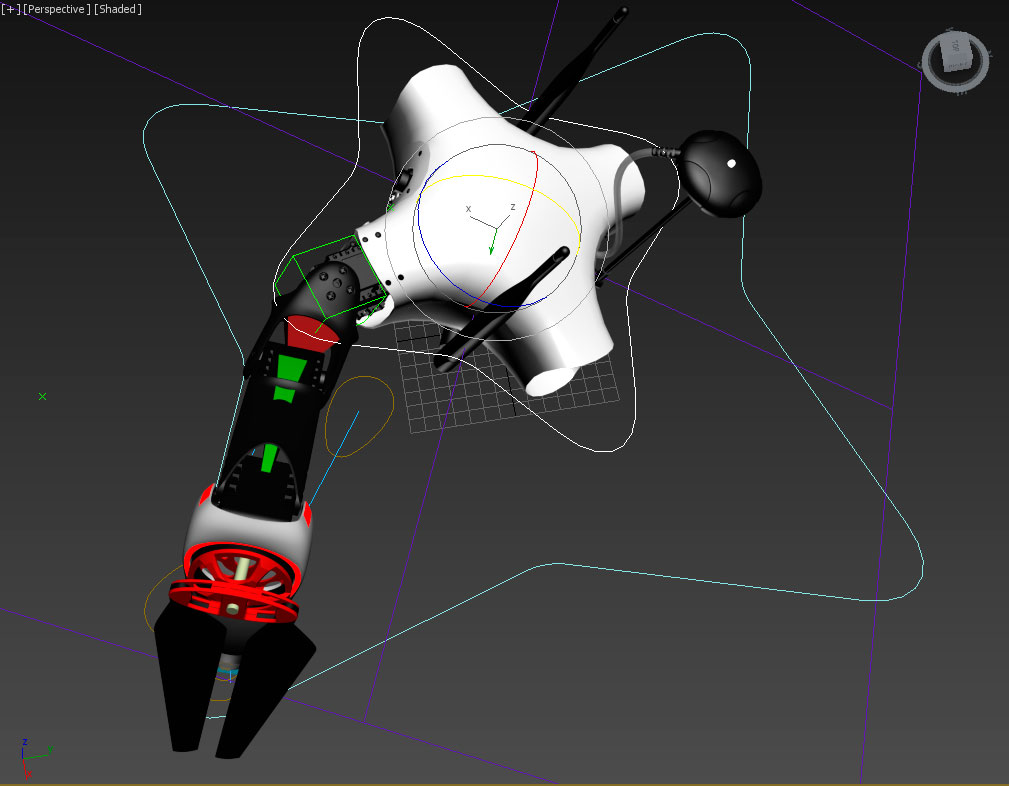
И чтобы работало и по оси Y надо точку опоры ноги проецировать, причем перпендикулярно, на плоскость тела. Примерно вот так.
Проблема в том что я пока не знаю как сделать так, чтобы точка проецировалась не руками) Может есть какой скрипт или тул который я не заметил?
Вот так он выглядит.
По задумке он должен двигать/поворачивать тело не сдвигая точку опоры ноги. Примерно вот так.
Вращается по оси Z нормально. Кость в начале ноги (может вращаться только в локальной Z) лукатом смотрит на точку опоры ноги сдвинутую на свою высоту. Остальные 2 кости висят на ик. Все три кости в одной плоскости.
Если добавить вращение по Y (чтобы робот поднимал вверх камеру) сустав выворачивается.
И чтобы работало и по оси Y надо точку опоры ноги проецировать, причем перпендикулярно, на плоскость тела. Примерно вот так.
Проблема в том что я пока не знаю как сделать так, чтобы точка проецировалась не руками) Может есть какой скрипт или тул который я не заметил?