Альтернатива чертежам. Эксперимент
Урок для знающих 3d max, но не знающих о существовании ImageModeler-а. Этим уроком я хотел показать альтернативный способ (может тупиковый а может и перспективный) моделирования без чертежей. Этот урок не откроет всех тонкостей программ и моделинга, просто покажет дорогу … (философия).
Используемое ПО:
Image Modeler (желательно REALVIZ ImageModeler 4.0 там еще до покупки Autodesk–ом все работает)
3D Max любой
Существует проблема для 3d моделлера - отсутствие чертежей, того или иного объекта, решить которую призвана программа ImageModeler. Работа этой программы элементарно проста, но, тем не менее, результат, достигаемый с ее помощью, может быть весьма внушителен (на мой взгляд, точно :-)).
На мой взгляд, есть несколько основных видов объектов, ОЧЕНЬ нуждающиеся в этой программе: Здания, мебель, и конечно автомобили.
Принцип работы ImageModeler состоит в том, что основываясь на нескольких фотографиях одного и того же объекта, снятого с разных ракурсов ОН (ImageModeler) выстраивает точки уже в 3D пространстве, определяет местоположение камеры и ее параметры, (чем то принцип схож с MatchMover, Boujou и т.д. но для двух трех кадров :-)), таким образом давая возможность легко ориентироваться при моделировании.
Для меня лично оказалось что самым удачным вариантом использования этой проги оказалось именно авто-моделирование … мебель – формы практически любой мебели довольно легко читаемы, здания - если это не памятники архитектуры или прославленные чем то еще, то достать много ракурсов хорошего качества тяжело (кроме как самому пойти и сфоткать), авто – любой Concept Car, свежий или не очень, часто не имеет чертежей, но зато интернет наполнен множеством фоток хорошего качества и с разных ракурсов.
Сhevrolet Stingray наш подопытный Concept car.
Все картинки должны быть одного и того же размера обязательно.
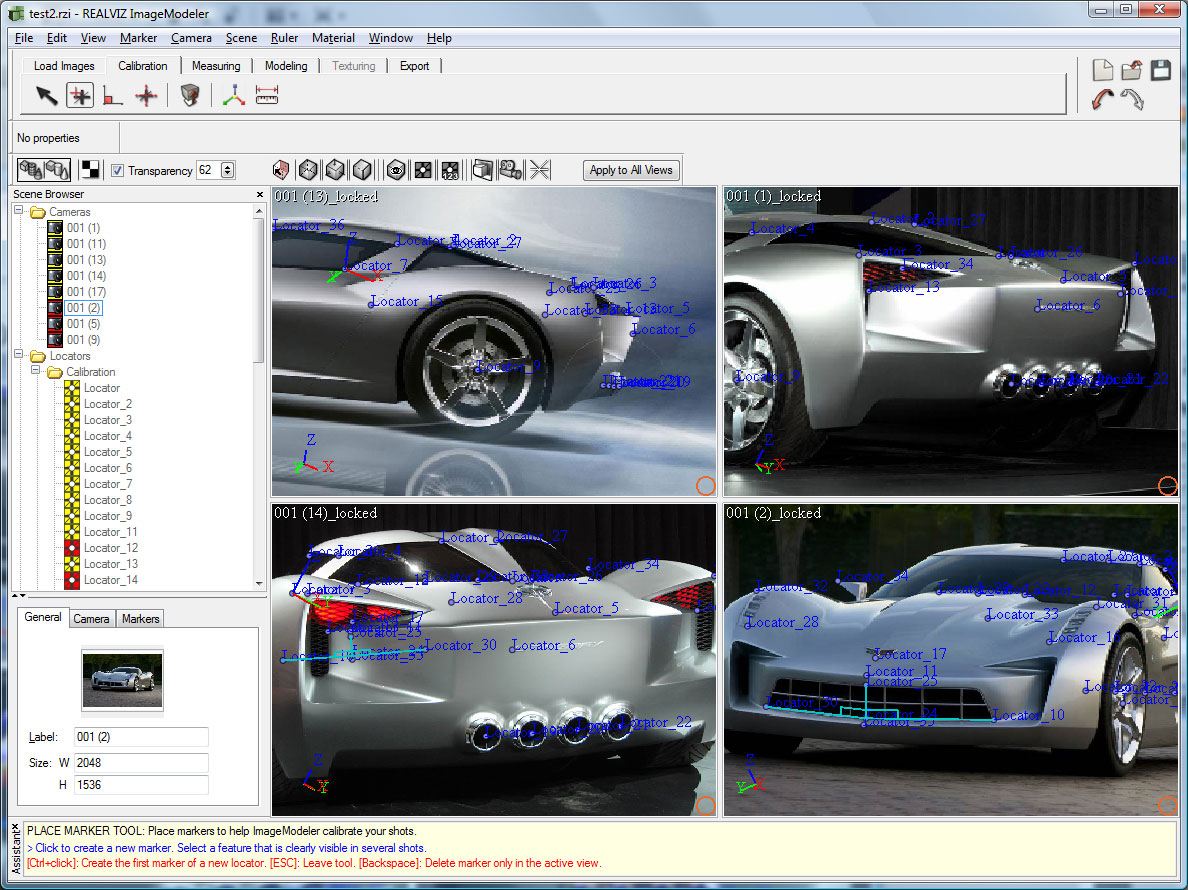
Вот так выглядит интерфейс этой программы,

Во вкладке калибровка несколько инструментов, выделить Маркер, Разместить Маркер, Разместить Угол (это если вы знаете что между теми точками 90 градусов как на первой картинке), Переместить Маркер, Калибровать, обозначить положение в пространстве, и обозначить длину.
Разместить маркер (Place Marker) – на всех загруженных в программу изображениях нужно разместить маркеры вручную чем больше изображений тем больше нужно разместить маркеров для удачной калибровки. Принцип очень похож на калибровку изображений при склейке панорам.
Разместить Угол (Place Corner) – на авто к сожалению тяжело найти угол 90 градусов, но вот на любом здании это не проблема, эта опция очень сильно помогает при калибровке.
Калибровать (Calibrate) – если вы аккуратно разместили достаточное количество маркеров то калибровка произойдет автоматически если нет то нажмите.
Остальные два инструмента не помогают откалибровать камеры, но ориентируют модель и маркеры в пространстве, рулеткой задается масштаб модели (важно при экспорте).
В этой программе есть инструменты для моделирования, но в нашем случае их недостаточно, тем более что есть возможность делать это в Max – e.
Итак, просидев пару часиков, может меньше, может больше, и, расставив аккуратно все необходимые маркеры, мы экспортируем наш результат в 3D max.
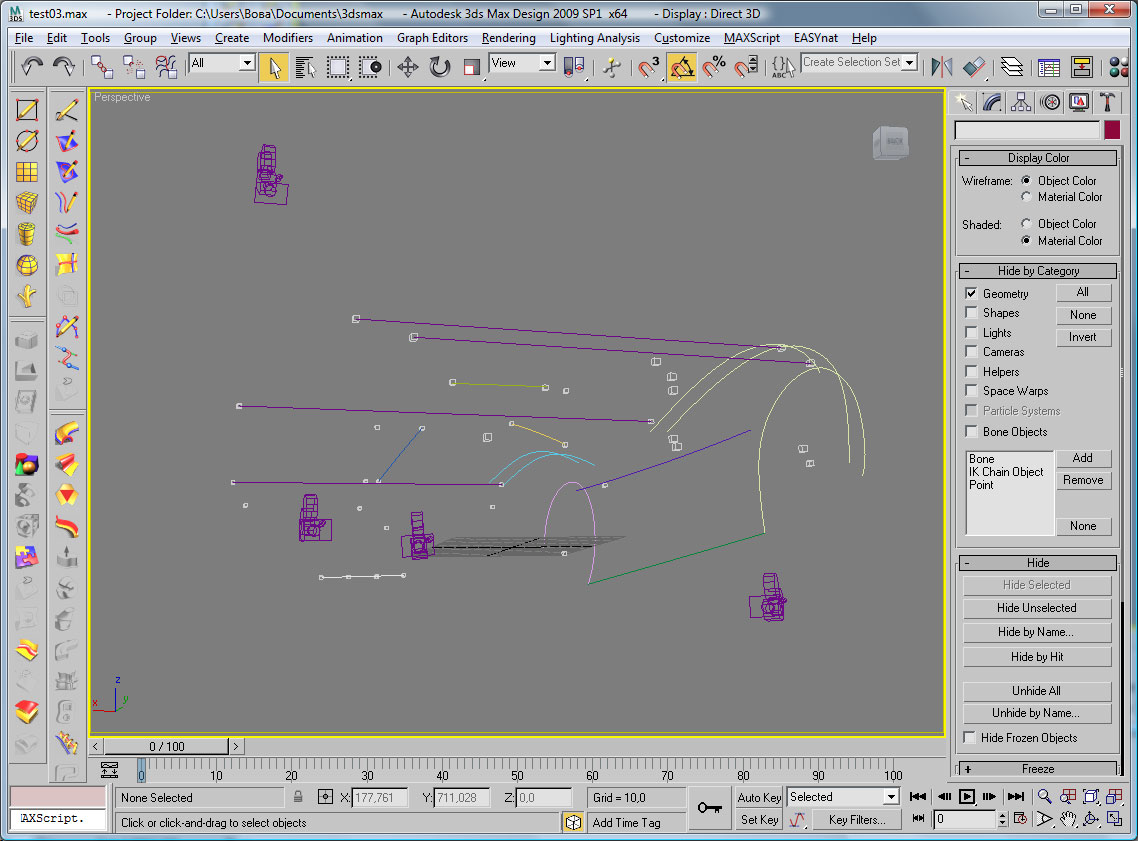
Файл, который экспортирует ImageModeler – скрипт, который в максе просто запускается через команду Run Script. Он создает камеры и Helpers.
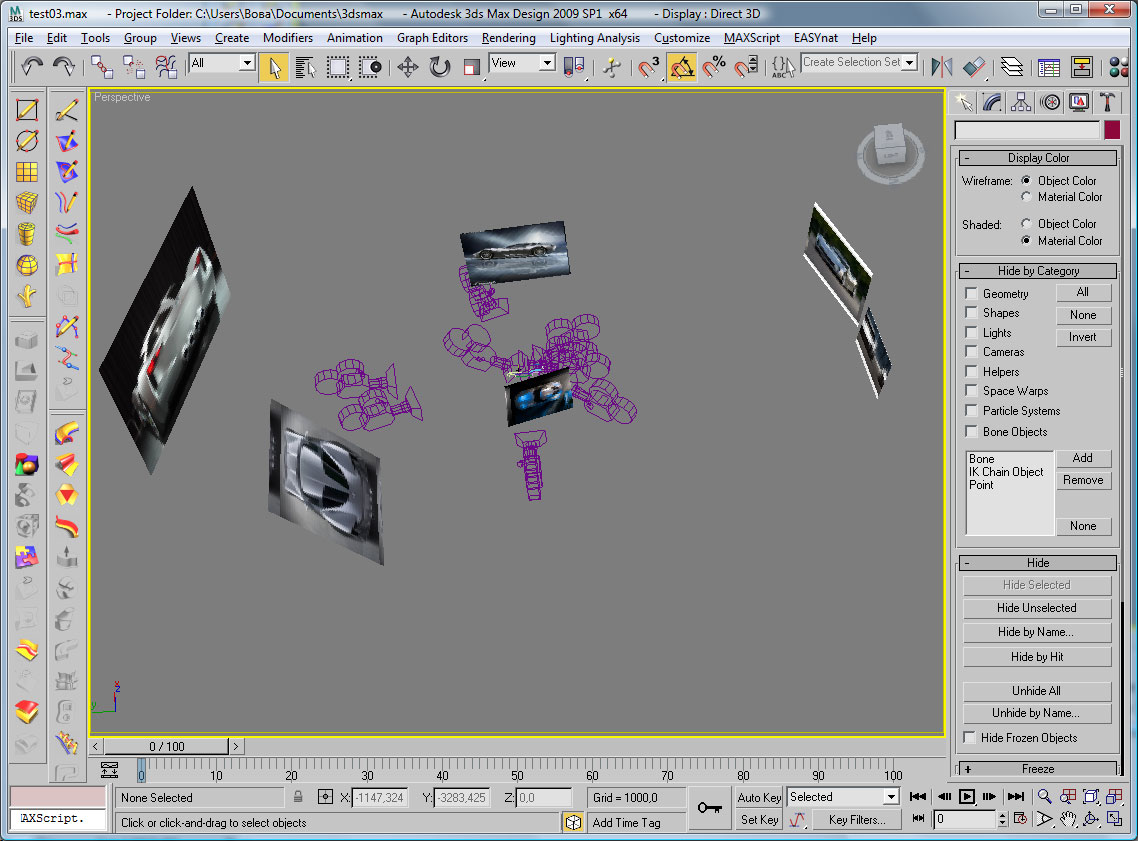
После импорта в макс все это можно сгруппировать и разместить так чтоб было удобно моделить (желательно чтоб центр облака точек находился в нуле координат).
Дальше нужно разместить наши фотки используемые в ImageModeler–е, в 3D max–е.
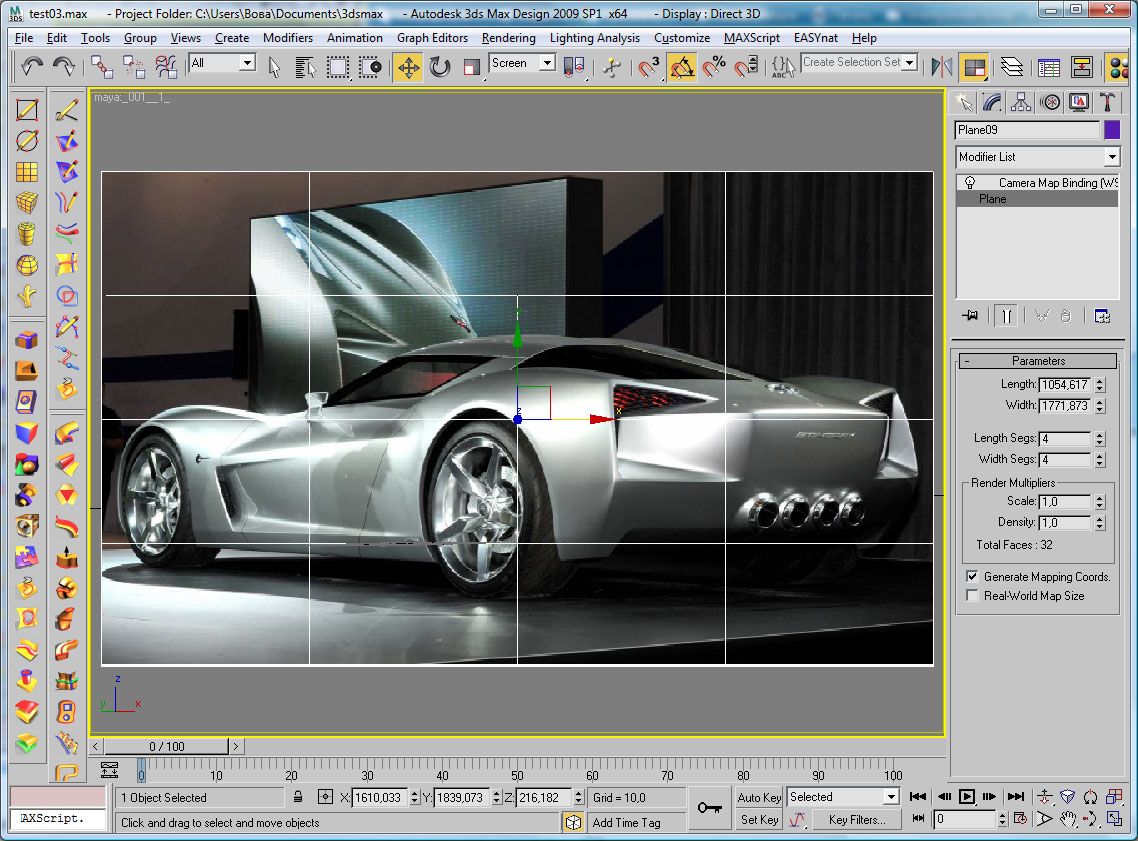
Переходим в вид из любой используемой нами камеры создаем Plane, затем используем выравнивание к виду (на рисунке) и используя Reference Coordinate System - SCREEN перемещаем Plane в центр вида. На Plane кидаем материал vray light и используем в качестве текстуры изображение (по имени камеры). Осталось применить к плоскости модификатор Camera Map (WSM), и в качестве камеры проекции выбираем нашу камеру.

Желательно все плоскости разложить по слоям, для удобства, потому что будут пересекающиеся между собой.
Когда вы все выставили, остается маленький, но важный вопрос – навигация.
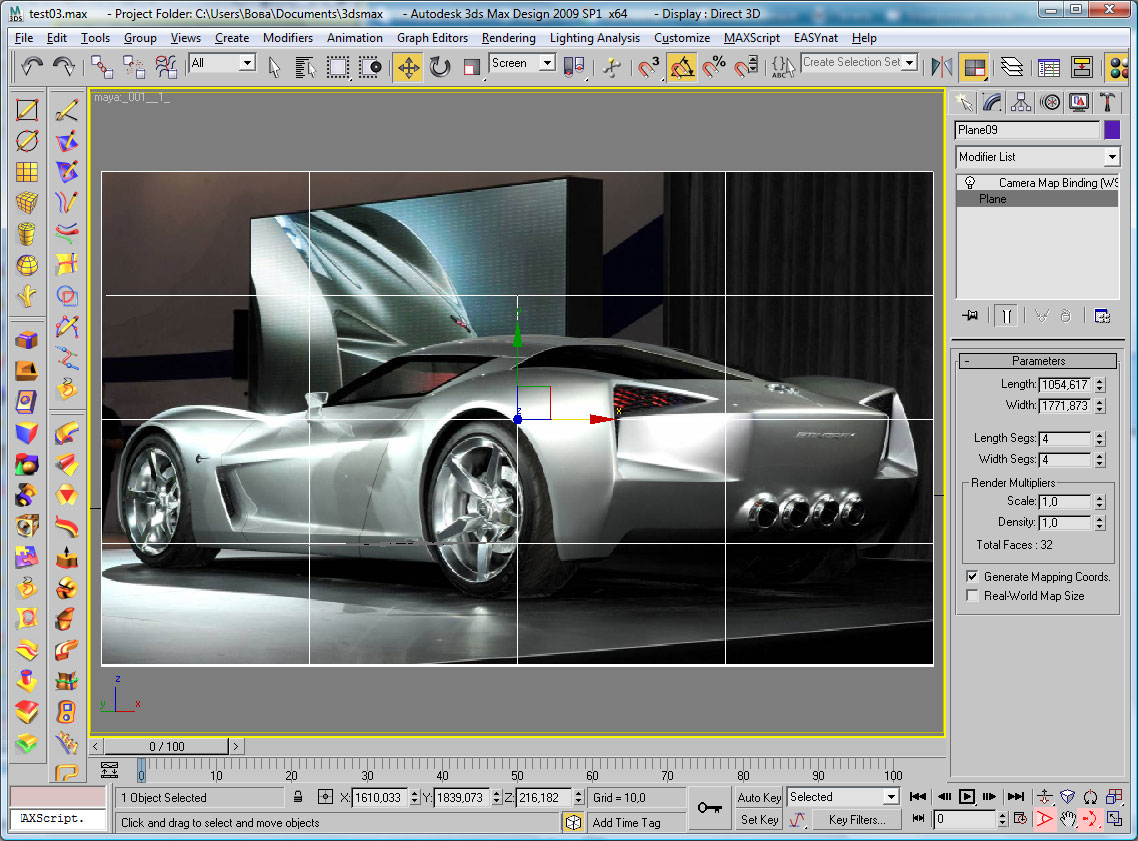
Для навигации переходим в любую из камер, потом включаем перспективу с этого же вида и создаем новую камеру. Первая должна проецировать изображение, а второй будем смотреть по сторонам, чтоб не исказить проекцию (используя только два выделенных красным инструмента навигации).
Дальше моделинг.
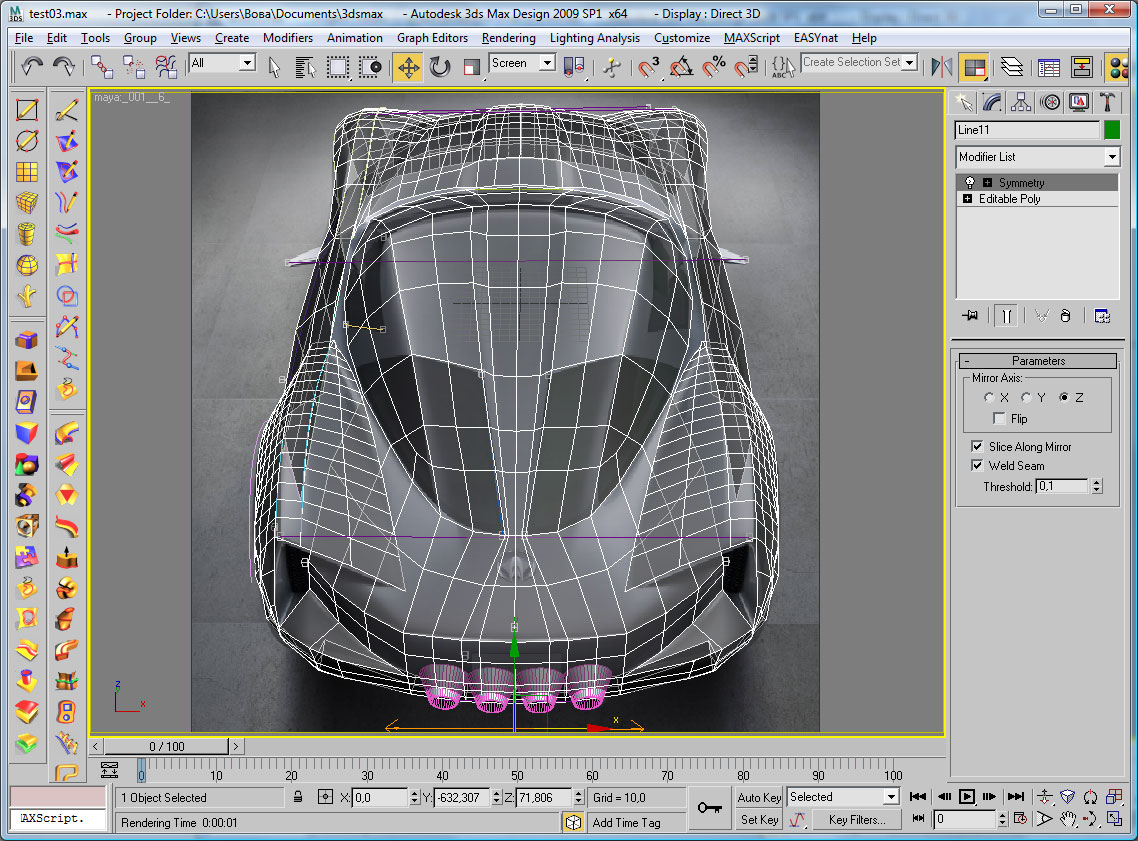
Так как объект симметричный можно все точки отразить относительно центральных, и переместить все объекты (и камеры и плоскости предварительно сгруппировав) так чтоб центральные точки лежали в нуле по X или Y.
Дальше кому как удобней можно сразу начать моделить «чистовик», я решил сделать черновые поверхности, чтоб от них потом отталкиваться.
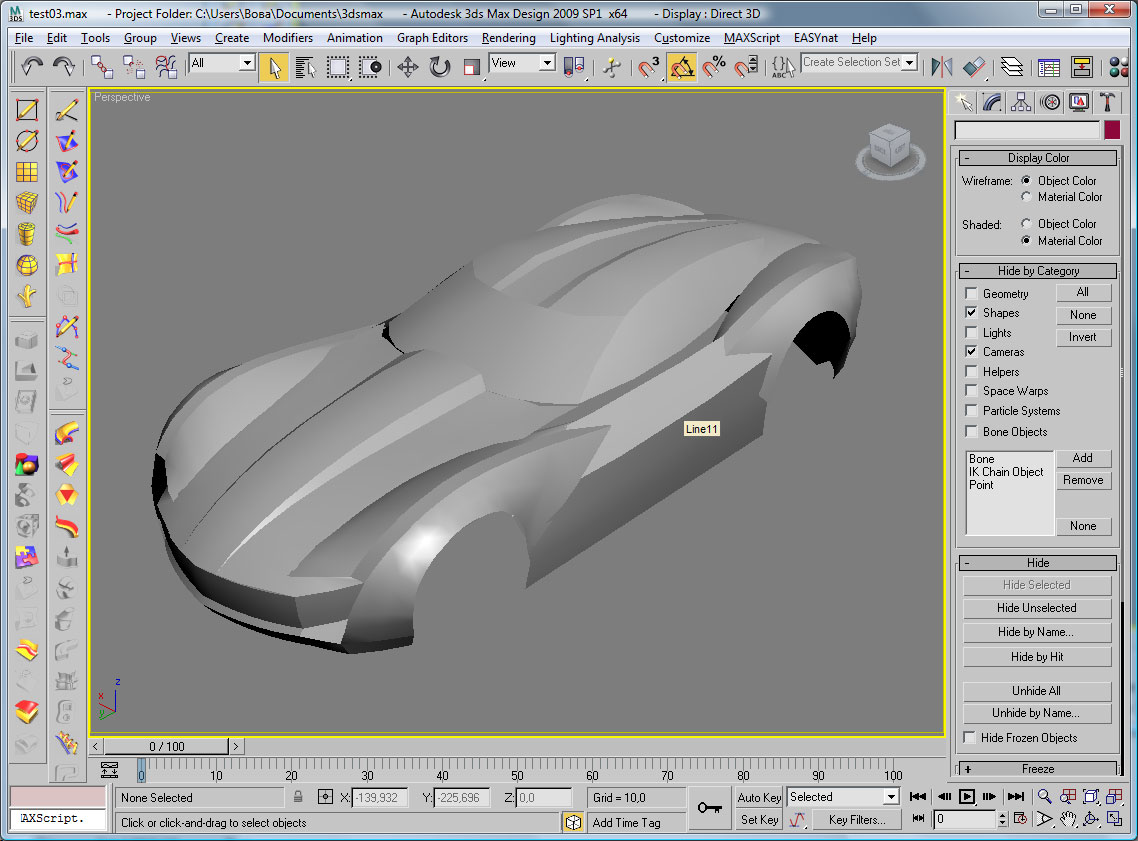
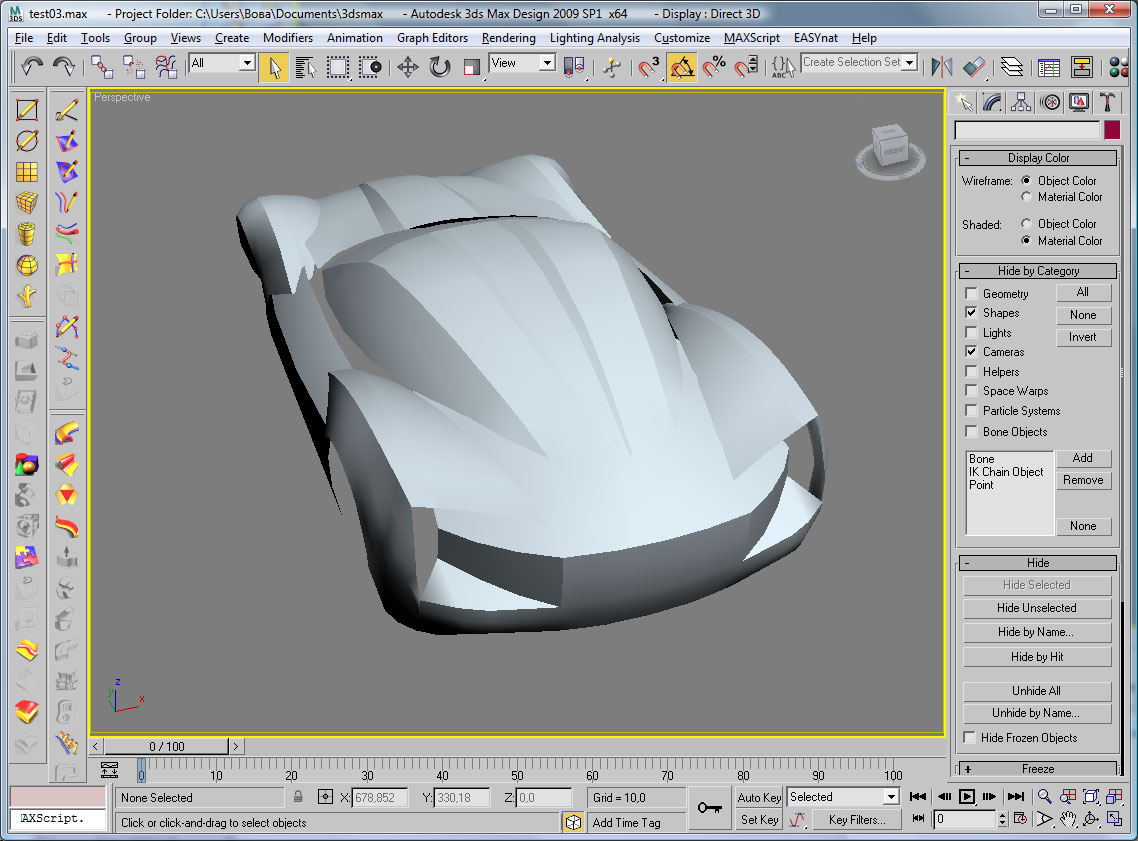
Конец.