- Рейтинг
- 10
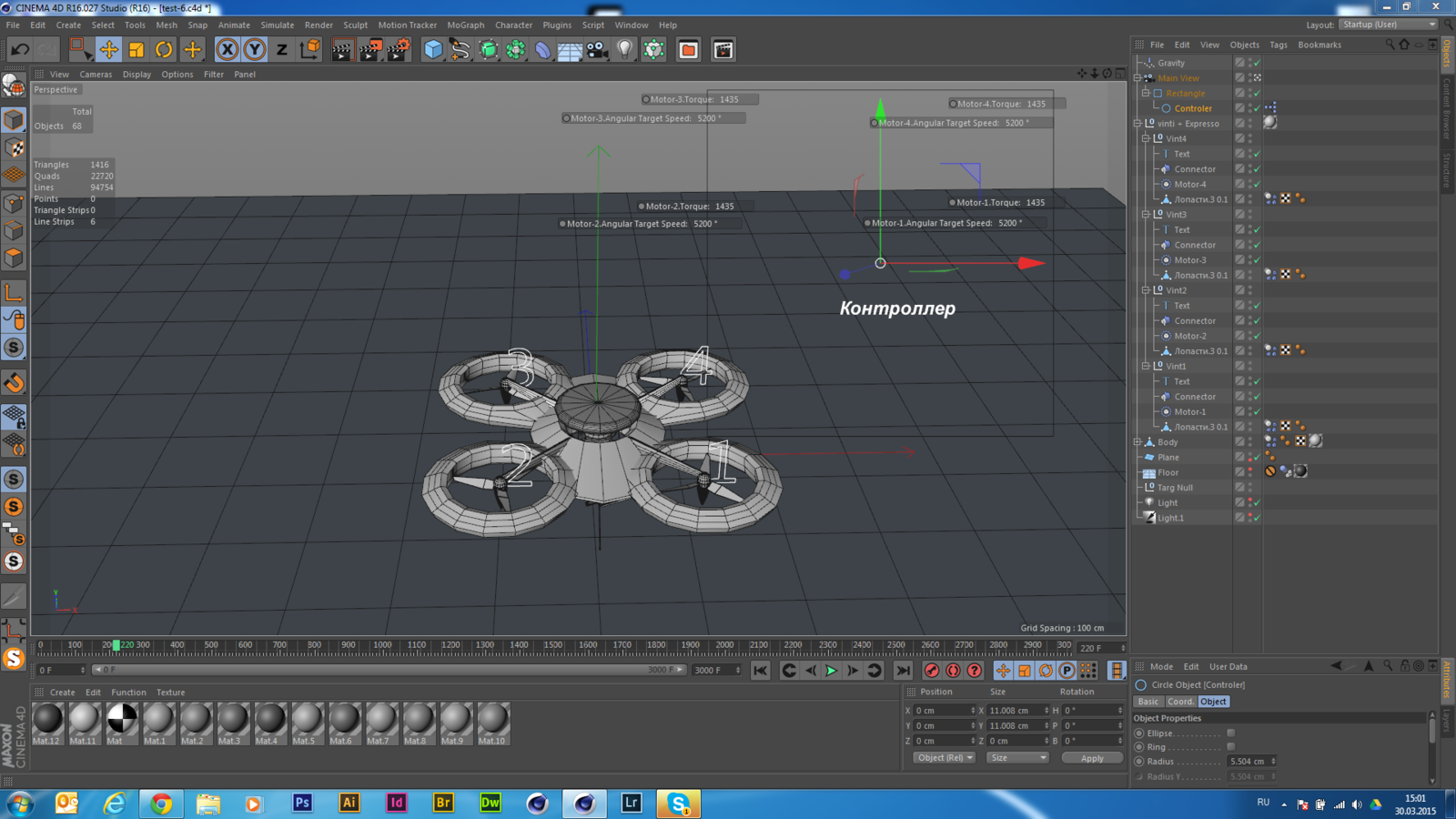
Всем привет. Сталкнулся с такой проблемой и не знаю как решить ее. Решил проанимировать квадрокоптер используя мотор и аэродинамику + небольшое управление.
Есть контроллер, который управляем им в двух плоскостях (пока) Направление Y - взлет и посадка, направление X - крен. Управление делал в expresso. при перемещее контроллера вверх, увеличивается мощность мотора, тем самым квадрокоптер поднимается вверх. Соответственно, если двигать по оси Y вниз, то мощность уменьшается, и он Снижается.
А вот дальше и начались проблемы.
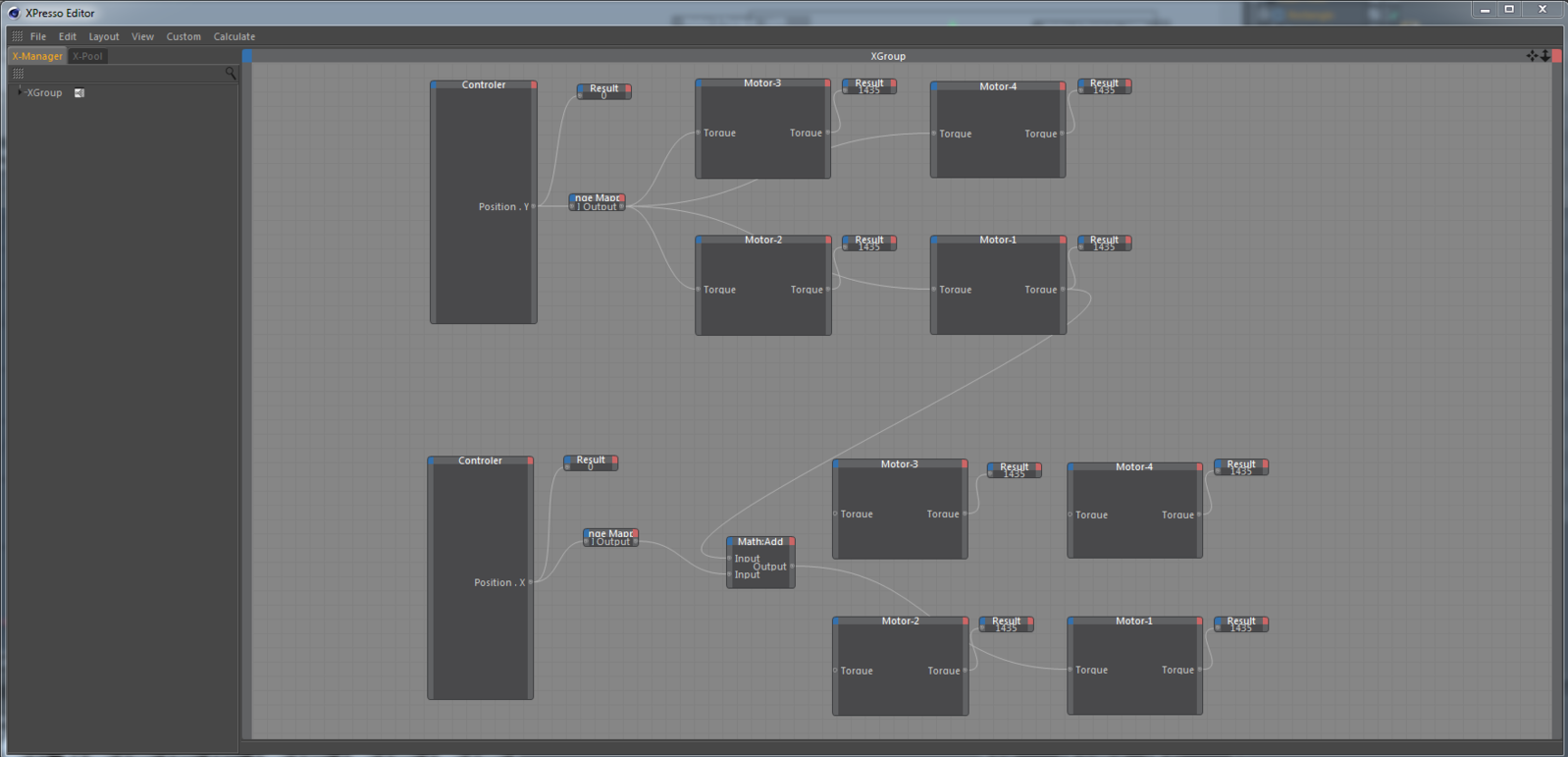
Движение по оси Х. Для того, чтобы квадрокоптер летел вправо, необходимо увеличить можность винтов 2 и 3. Соответсвенно в лево 1 и 4. Но как этого доиться не понял. В Expresso сделал простую последовательность. При полете вправо - брал выходные данные из мотора - которые изначально задавались положением контроллера и складывал с данными которые брались из положение контроллера по Y
Но. В Expresso меня результат устраивал, а вот в реали, не работал... Хотелось бы услышать мнение. что не так?
Есть контроллер, который управляем им в двух плоскостях (пока) Направление Y - взлет и посадка, направление X - крен. Управление делал в expresso. при перемещее контроллера вверх, увеличивается мощность мотора, тем самым квадрокоптер поднимается вверх. Соответственно, если двигать по оси Y вниз, то мощность уменьшается, и он Снижается.
А вот дальше и начались проблемы.
Движение по оси Х. Для того, чтобы квадрокоптер летел вправо, необходимо увеличить можность винтов 2 и 3. Соответсвенно в лево 1 и 4. Но как этого доиться не понял. В Expresso сделал простую последовательность. При полете вправо - брал выходные данные из мотора - которые изначально задавались положением контроллера и складывал с данными которые брались из положение контроллера по Y
Но. В Expresso меня результат устраивал, а вот в реали, не работал... Хотелось бы услышать мнение. что не так?
") У меня 95% всех действий в жизни обусловлены этими двумя факторами.
У меня 95% всех действий в жизни обусловлены этими двумя факторами.